Recently got E50UG hEX refresh to replace a switch, original idea was just to transfer data with better management, later I started to use NTP client/server and GPS for TimeSync.
Got GPS UBlox VK-172.
Dont buy it if you are serious about GPS, its a counterfeit, yet it works and can be configured with U-Center software.
There are few considerations how to use GPS module for time syncing - mostly using PPS signal via serial port for 30 ns precision.
This is not available for hEX, just USB connection, which limits timesync for NMEA messages only.
I have few questions about GPS plugin:
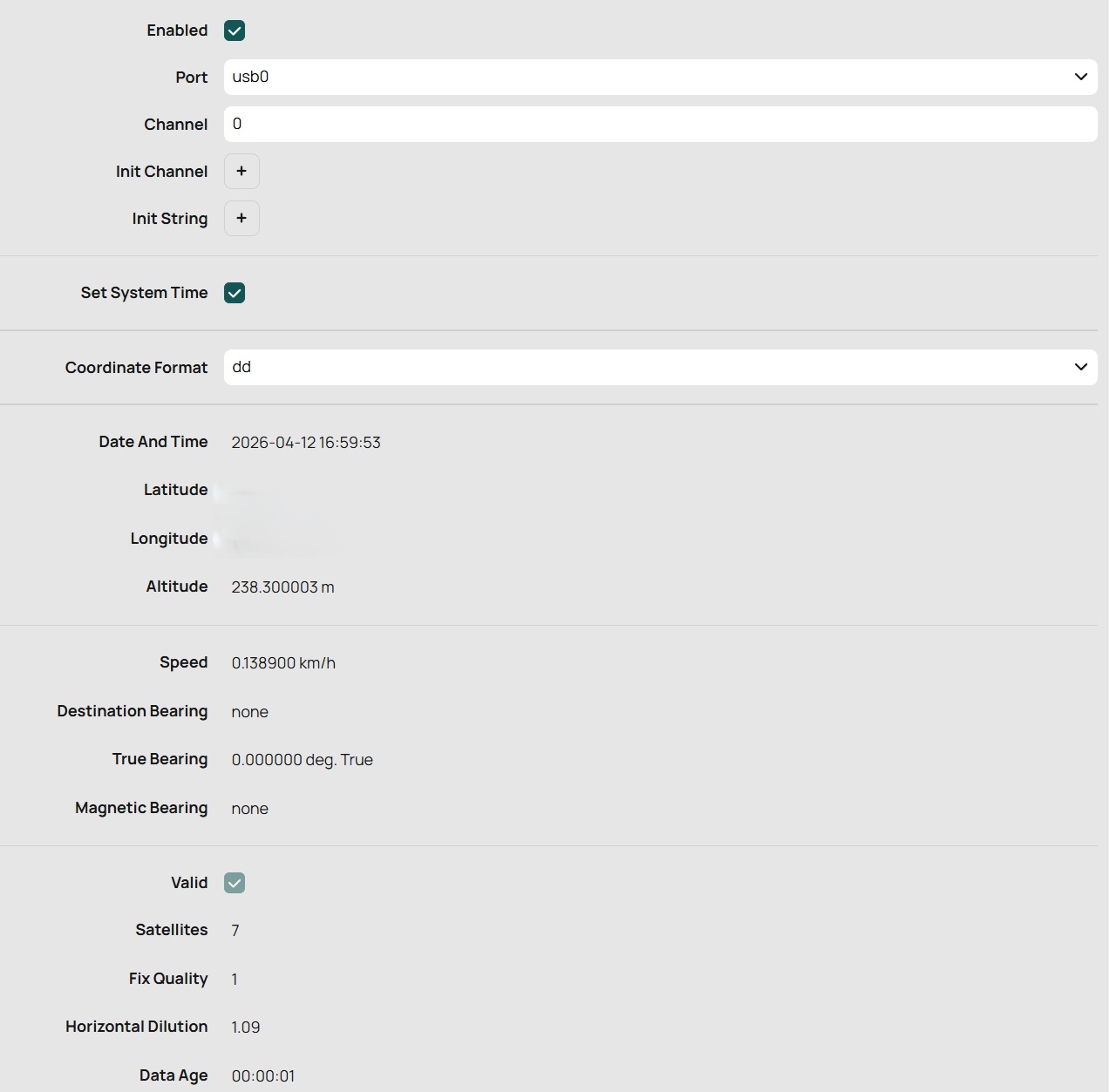
The plugin seems to work with RMC and and GLL messages:
https://receiverhelp.trimble.com/alloy-gnss/en-us/NMEA-0183messages_MessageOverview.html
Now, NMEA is by no means an accurate way of syncing. Given the USB 1.10 polling of 1000Hz, it can be accurate down to 1 milisecond at best.
I would like to increase the precision to level when hEX would not be rejected as a timesource by Chrony server.
Most guides include:
- Increasing baud rate
- Disable all NMEA messages except ZDA which carries just time and date.
(in U-Center, there might be an INIT command, still looking) - Increasing polling rate on the GPS module from 1 to 5Hz or 10Hz
Few notes and hints I learned:
a) You can use USB cable with external power input, so you can back-up the USB module when rebooting router, and/or switching it between computers for re-configuration.
b) So far 38400 baud seems to work best in order to get acceptable time sync.
c) If the GPS has power source, router will sync with it as soon as it reboots.
However, now router powers down the USB during reboot, can be worked around using external power source.
So, the Questions:
-
Is it possible to process ZDA messages by GPS plugin?
At the moment, ZDA messages are not picked by GPS plugin, so I keep active RMC and GLL. -
How does the GPS plugin process time decimals?
Messages send time in format 071255.15 translating to 07:12:55 and 150 miliseconds,
I just assume the decimals get rounded, so using 1 Hz polling rate sorts out uncertainty, as timestamp sent from gps is always whole second.
Knowing if there is a support for sub-second timeframe will improve the accuracy.
-
Is it possible to keep USB powered during reboot?
Consider usb GPS as an external local time source, it will sync the router instantly. -
Cloud sync on or off?
Few times, router picked up time from cloud source before GPS key booted up, caught satellite signal… the time it had helped with first sub-milisecond sync (when PPS sync is not available), so Chrony server would not reject the router as a source, afterwards syncing was overtaken by GPS.
Later I turned it off just to rule out another factor.